Das Controller Area Network (CAN-Bus) ist ein nachrichtenbasiertes Protokoll, das entwickelt wurde, um die elektronischen Steuergeräte (ECUs) in heutigen Fahrzeugen und anderen Geräten zuverlässig und prioritätsgetrieben miteinander kommunizieren zu lassen. Dadurch ist es möglich, dass zahlreiche Steuergeräte miteinander kommunizieren können, ohne dass es dafür einen Hauptcomputer benötigt und ohne, dass diese Steuergeräte einzeln miteinander verkabelt werden. Eine große Errungenschaft, die Bosch im Jahre 1983 entwickelt hat und bis heute eine enorme Relevanz hat.
Branchenweite Anwendungsbereiche des CAN-Bus
Der CAN-Bus hat sich besonders in der Automobilindustrie als unverzichtbar erwiesen, um eine nahtlose Kommunikation zwischen den zahlreichen elektronischen Steuergeräten und Sensoren in modernen Fahrzeugen zu gewährleisten. Funktionen wie Motorsteuerung, Airbag-Systeme, Anti-Blockier-Systeme (ABS) und mehr werden durch den CAN-Bus ermöglicht.
Abseits der Automobilindustrie findet der CAN-Bus auch in anderen Sektoren und Anwendungsbereichen Verwendung. Eingebettete Systeme in der Industrieautomation, medizinischen Geräten, Flugzeugen, landwirtschaftlichen Maschinen und vielen weiteren Anwendungen profitieren von der Zuverlässigkeit und Effizienz des CAN-Bus-Protokolls.
Die Schlüsselrolle des CAN-Bus in der Fahrzeugsicherheit
Der CAN-Bus spielt eine zentrale Rolle in der Fahrzeugsicherheit, indem er als ein Netzwerksystem für die Kommunikation zwischen verschiedenen Fahrzeugkomponenten dient. Dabei ermöglicht CAN-Bus den Datenaustausch zwischen Steuergeräten und Sensoren, was für die effektive Steuerung und Überwachung verschiedener Sicherheitsfunktionen im Fahrzeug von entscheidender Bedeutung ist.
Eine zuverlässige Kommunikation über den CAN-Bus ist unerlässlich, da fehlerhafte Übertragungen von Informationen schwerwiegende Sicherheitsprobleme verursachen können. Besonders wichtig ist zu betonen, dass der CAN-Bus anfällig für potenzielle Angriffe ist, da er integraler Bestandteil eines vernetzten Systems ist und keine eigenen Sicherheitsvorkehrung implementiert hat. Daher ist es von herausragender Bedeutung, angemessene Sicherheitsmaßnahmen zu implementieren, um unbefugten Zugriff und Manipulationen auf den CAN-Bus zu unterbinden und somit die Sicherheit der Fahrzeuginsassen sowie der anderen Verkehrsteilnehmer zu gewährleisten.
Um die Sicherheit des CAN-Busses zu garantieren, bedarf es entsprechender Sicherheitsmaßnahmen. Hierzu zählt die Implementierung von Verschlüsselungs- und Authentifizierungstechniken, die die Integrität der übertragenen Daten gewährleisten und unbefugten Zugriff verhindern. Darüber hinaus ist es von essenzieller Bedeutung, Mechanismen zur Erkennung und Abwehr von Angriffen auf den CAN-Bus zu entwickeln.
Funktionsweise des CAN-Bus: Ein Blick auf das Kommunikationssystem
Aufbau eines CAN-Bus-Systems
Das CAN-Bus-Kommunikationssystem basiert auf zwei elektrischen Leitungen, bekannt als CAN-High und CAN-Low. Die Datenübertragung erfolgt durch gegensätzliche Ladungen, wodurch Störungen reduziert werden. Die Teilnehmer(CAN Node) im Netzwerk senden Nachrichten an alle anderen Teilnehmer, und spezielle Identifikationsnummern(Identifier) steuern Priorität und Empfänger.
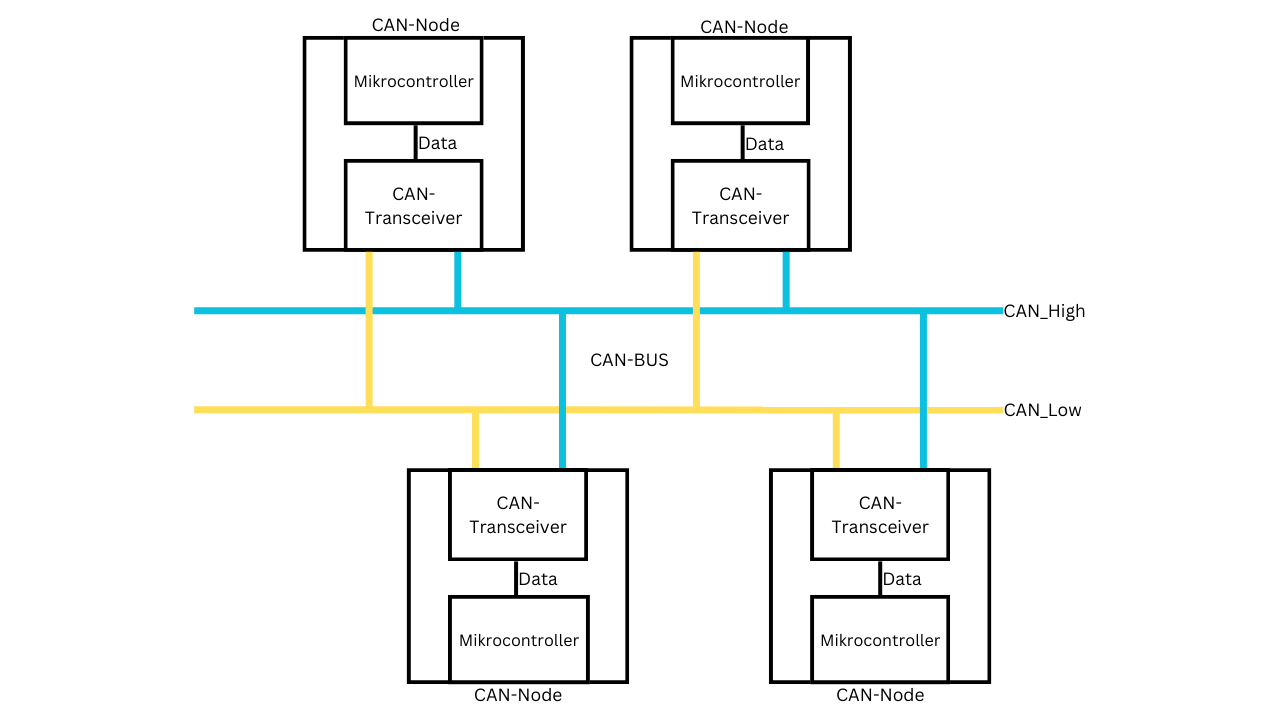
Abb. 1: Schematischer Aufbau CAN-Bus mit mehreren Teilnehmern(Nodes)
Aufbau von CAN-Frames:
Die CAN-Frames ermöglichen die Übertragung von Daten in einem Controller Area Network. Sie bestehen aus verschiedenen Feldern, die spezifische Informationen enthalten. Es gibt zwei verschiedene Arten von Frames: der Standard CAN Frame und der Extended CAN Frame.
Standard CAN Frame:
-
Start of Frame (SOF): 1 Bit - Start eines CAN-Frames.
-
Identifier (ID): 11 Bits - Priorität des Frames und Adresse des sendenden Nodes.
-
Remote Transmission Request (RTR): 1 Bit - Kennzeichnet Daten- oder "remote request frame".
-
Control: 6 Bits - Enthält Steuerinformationen wie den "data length code" (DLC).
-
Data: 0-64 Bits - Enthält die übertragenen Daten.
-
CRC (Cyclic Redundancy Check): 16 Bits - Erkennung von Übertragungsfehlern.
-
Acknowledgement (ACK): 2 Bits - Bestätigung.
-
End of Frame (EOF): 7 Bits - Abschluss des Frames.
Extended CAN Frame:
Der Extended CAN-Frame erweitert den Identifier auf 29 Bits, was eine umfassendere Adressierung ermöglicht.
-
Start of Frame (SOF): 1 Bit - Start eines erweiterten CAN-Frames.
-
Extended Identifier (XID): 29 Bits - Enthält die erweiterte Identifikationsnummer, die sowohl Priorität als auch Adresse des sendenden Nodes umfasst.
-
Remote Transmission Request (RTR): 1 Bit - Kennzeichnet Daten- oder "remote request frame".
-
Control: 6 Bits - Enthält Steuerinformationen, einschließlich des "data length code" (DLC).
-
Data: 0-64 Bits - Enthält die übertragenen Daten.
-
CRC (Cyclic Redundancy Check): 15 Bits - Dient der Erkennung von Übertragungsfehlern.
-
Acknowledgement (ACK): 2 Bits - Bestätigung.
-
End of Frame (EOF): 7 Bits - Abschluss des erweiterten Frames.
Varianten des CAN-Bus im Überblick: Eine differenzierte Betrachtung
-
Low-Speed CAN:
-
Für fehlertolerante Systeme mit niedrigen Aktualisierungsraten.
-
Einsatz in der Automobilindustrie für Diagnose, Bedienelemente und Anzeigen.
-
Maximale Datenübertragungsrate von 125 kbps.
-
Beispielanwendung: Komfortelektronik (z. B. Fensterheber).
-
-
High-Speed CAN:
-
Für die Kommunikation zwischen wichtigen Teilsystemen mit hohen Aktualisierungsraten.
-
Datenübertragungsraten von 1 kbit bis 1 Mbit pro Sekunde.
-
Beispielanwendung: Sicherheitsrelevante Elektronik (z. B. ABS).
-
-
CAN FD (Flexible Data Rate CAN):
-
Einführung flexibler Datenraten für mehr Daten pro Nachricht und schnellere Übertragungen.
-
Erhöhte Datenlänge auf 64 Bytes und maximale Datenrate von 8 Mbps.
-
Nicht Abwärtskompatibel
-
Welche Vorteile hat das CAN-Bus-System?
-
Wartbarkeit: Ermöglicht einfache Diagnose, Datenaufzeichnung und Konfiguration.
-
Effizient: Priorisierung von Frames ermöglicht sofortigen Buszugriff für Daten mit höchster Priorität.
-
Äußerst robust: Widerstandsfähig gegen elektrische Störungen und elektromagnetische Interferenzen.
-
Einfache Implementierung: Erprobter Standard mit umfangreicher Unterstützungsstruktur.
Welche Nachteile hat das CAN-Bus-System?
-
Keine integrierten Sicherheitsvorkehrungen: CAN-Bus-Systeme sind anfällig für Cyberangriffe, da sie keine eingebauten Sicherheitsvorkehrungen bieten.
-
Limitierte Datenrate: Selbst mit dem neuen CAN FD-Standard bleibt die maximale Datenrate begrenzt, und sie beträgt nur 8 Mbps.
Fazit: Zusammenfassung und Ausblick auf die Zukunft des CAN-Bus
Zusammenfassend lässt sich feststellen, dass das CAN-Bus-System in verschiedenen Branchen, darunter die Automobilindustrie, industrielle Automation, Robotik, Luft- und Raumfahrt sowie andere Sektoren, breite Anwendung findet. Seine beeindruckende Leistungsfähigkeit und Zuverlässigkeit haben es zu einer bevorzugten Wahl für die Datenkommunikation gemacht. Insbesondere das CAN FD-Protokoll, mit seiner flexiblen Datenraten und der Möglichkeit für schnellere Übertragungen, erhöht die Vielseitigkeit des Systems.
Besonders hervorzuheben ist die Rolle des CAN-Bus in der Entwicklung autonomer Fahrzeuge. Er bildet das Rückgrat für die Kommunikation zwischen den zahlreichen Sensoren und Steuergeräten, die für autonome Systeme unerlässlich sind. Durch seine Fähigkeit, große Datenmengen effizient zu verarbeiten und zu übertragen, trägt er maßgeblich zur Sicherheit, Zuverlässigkeit und Präzision dieser Fahrzeuge bei.
Trotz seiner vielen Vorteile, wie der hohen Wartbarkeit, der effizienten Priorisierung von Nachrichten und seiner Robustheit gegenüber Störungen, darf nicht übersehen werden, dass der CAN-Bus auch Schwächen aufweist. Die begrenzte Datenrate sowie die fehlenden integrierten Sicherheitsvorkehrungen stellen Herausforderungen dar, die in einer zunehmend vernetzten und datenintensiven Welt berücksichtigt werden müssen. Daher sind Mechanismen zur Abwehr von Cyberangriffen auf den CAN-Bus erforderlich, um diese Nachteile zu mildern.
Insgesamt ist der CAN-Bus ein beeindruckendes Beispiel dafür, wie eine gut durchdachte Technologie die Grundlage für Fortschritte in verschiedenen technologischen Bereichen bilden kann.

Marco Gren
Marco ist ein leidenschaftlicher Cybersecurity Consultant, insbesondere mit Fokus auf Automotive-Security. Sein Interesse an Technologie erstreckt sich jedoch weit über das Digitale hinaus – von 3D-Druck bis zu allem, was blinkt und tutet.